ICRA 2025: Safety-critical control for aerial physical interaction in uncertain environment
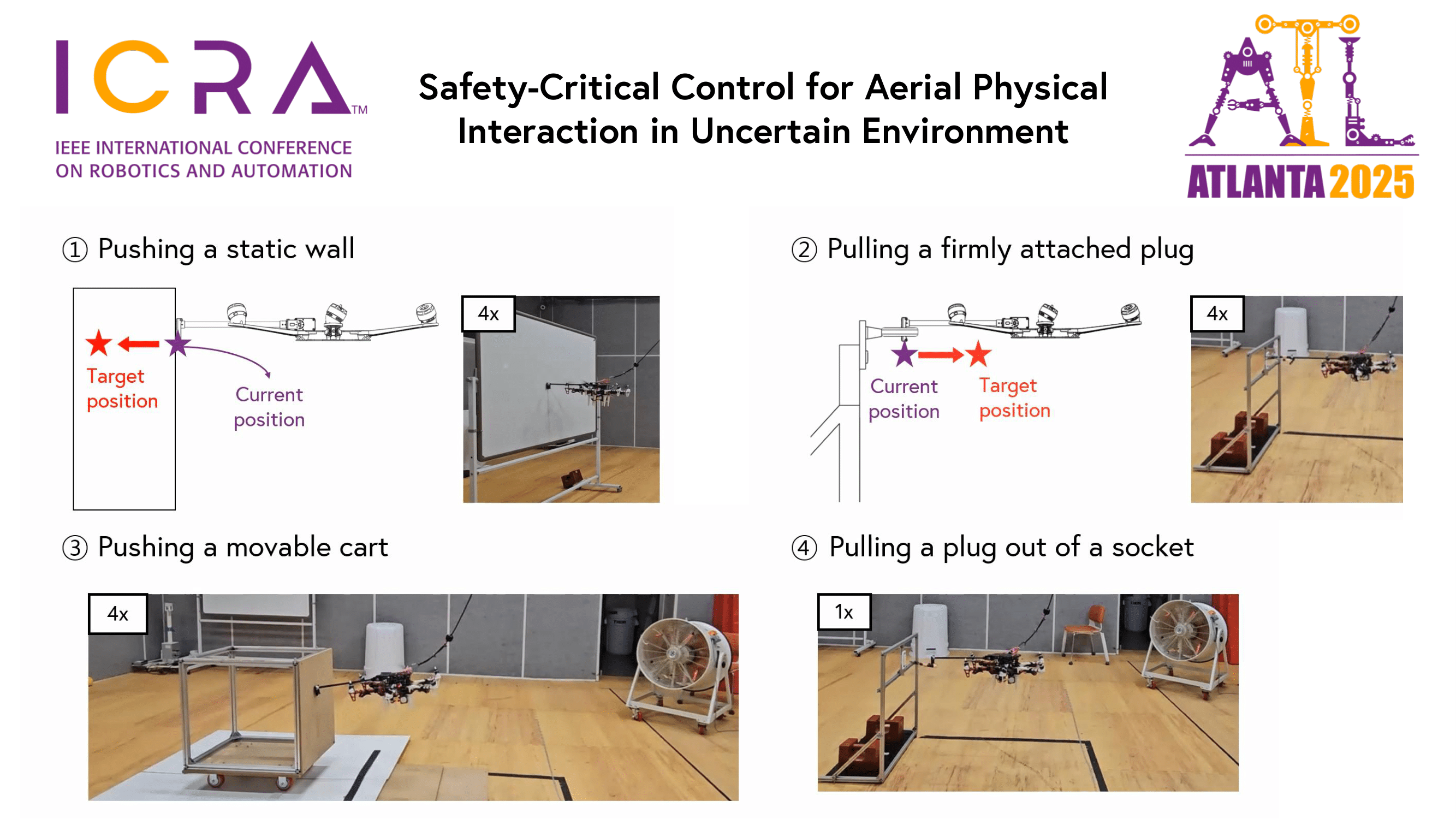
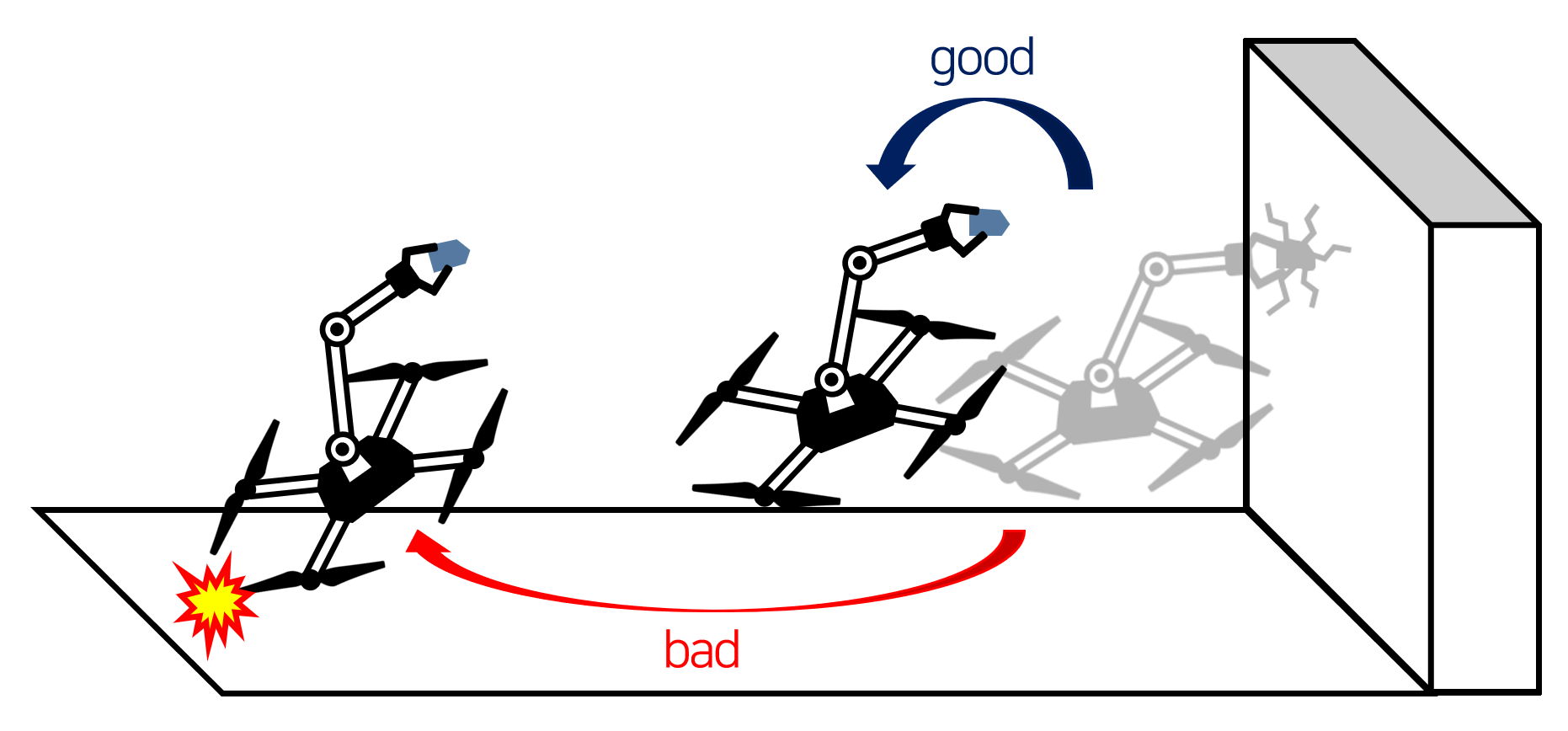
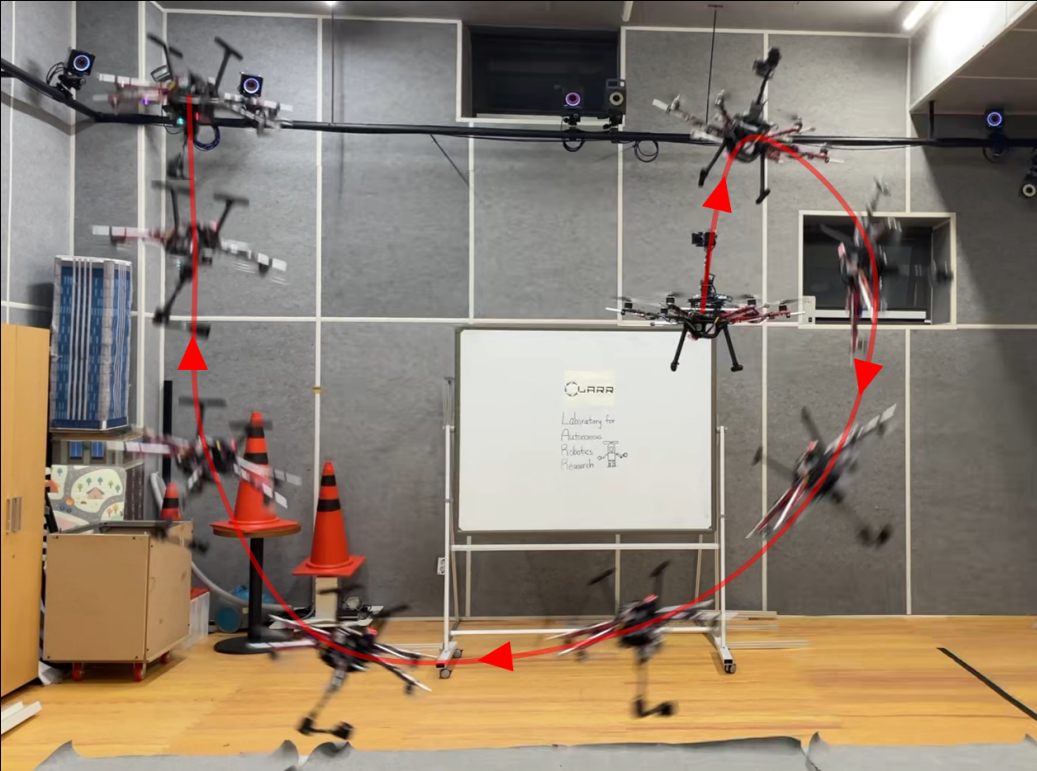
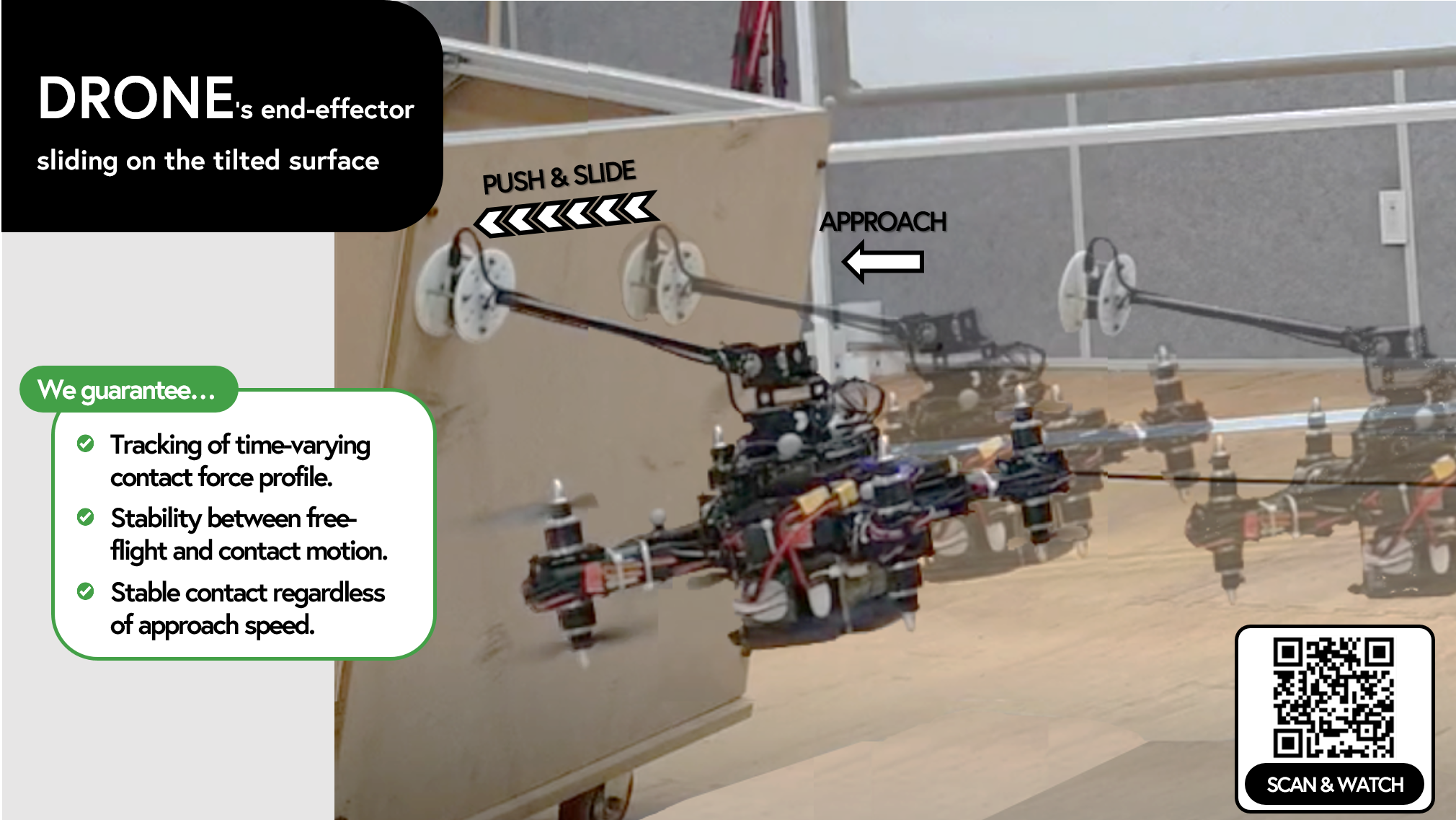
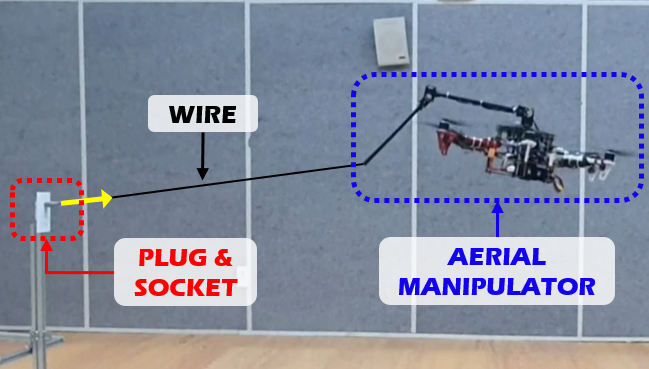
📃 Abstract: Aerial manipulation for safe physical interaction with their environments is gaining significant momentum in robotics research. In this paper, we present a disturbance-observer-based safety-critical control for a fully actuated aerial manipulator interacting with both static and dynamic structures. Our approach centers on a safety filter that dynamically adjusts the desired trajectory of the vehicle’s pose, accounting for the aerial manipulator’s dynamics, the disturbance observer...