
Globally defined dynamic modelling and geometric tracking controller design for aerial manipulator
📃 Abstract: This study presents a globally defined dynamics for a conventional multirotor equipped with a single n−DOF manipulator using modified Lagrangian dynamics. This enables the reformulation of entire dynamics directly on SO(3) without exploiting any local coordinates, and thus problems such as the singularity of Euler angles can be avoided. Since skew-symmetric property of Coriolis matrix C and inertia matrix facilitates stability analysis, we propose a method to compute C which guarantees the skew-symmetric property by considering C as a summation of two sub-matrices. Then, a geometric tracking controller is designed based on decoupled dynamics applying passive decomposition. The proposed controller guarantees almost global region of attraction. We validate our method via consecutive aerial flipping experiments.
✊ Motivation:
❗ Since most research on aerial manipulators use Euler angle to describe and control the attitude of systems, the superior maneuverability of the aerial platform is not fully exploited and thus the robot may fail to carry out given missions due to the singularity problem.
❗ Singularity of Euler angle limits theoretical developments for controller design and stability analysis.
❗ Since most aerial manipulators have a single manipulator attached to top or bottom of the platform, performing tasks on the other side of attached surface is impossible due to attitude limitation.
❗ One may try attaching an extra or a very long manipulator to enlarge the workspace of platform, but this is extremely inefficient because the multirotor base is vulnerable to inertia.
💡 Main contributions:
✔️ This is the first attempt to explicitly reveal globally defined dynamics of an aerial manipulator using rotation matrices and angular velocities instead of local description of SO(3) where problems of local coordinates such as singularities can be avoided.
✔️ We propose Coriolis matrix which assures the skewsymmetric property facilitating stability analysis although a direct use of the christoffel symbols is restricted because of difference between the modified Euler-Lagrange equation and the standard one.
✔️ We present a geometric controller based on decoupled dynamics applying passive decomposition.
✔️ We can guarantee the almost global exponential stability for attitude and joint angle dynamics and almost global exponential attractiveness for complete dynamics.
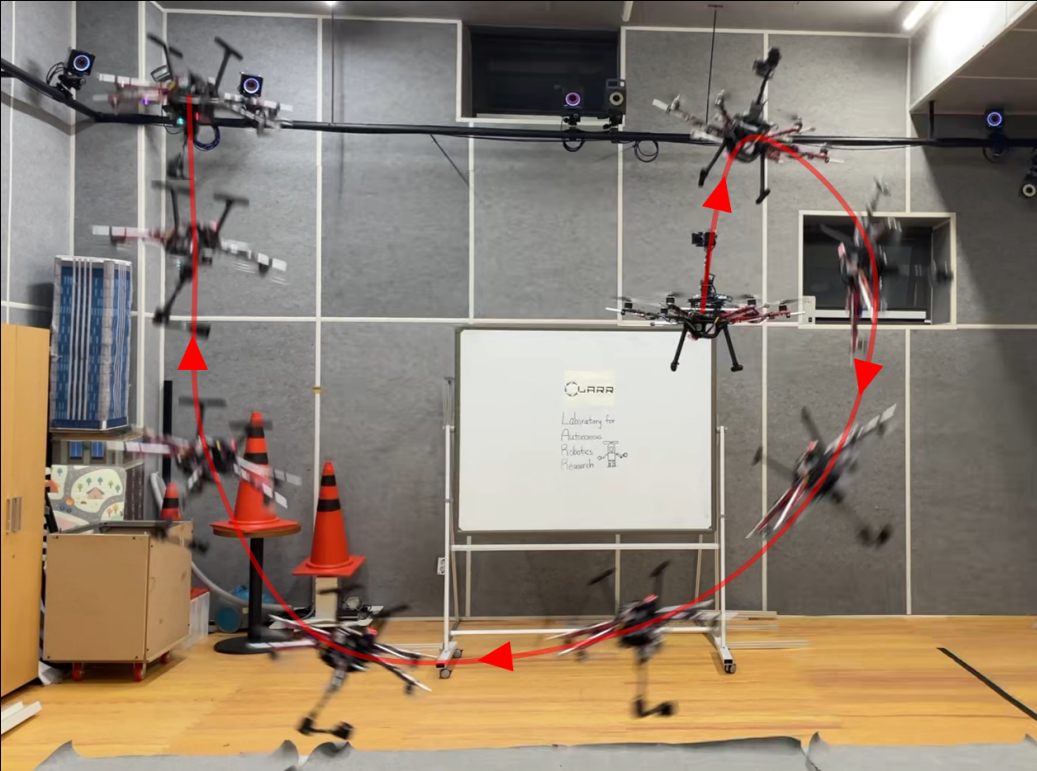
✔️ A real-world experiment of consecutive aerial flipping demonstrates the above mentioned stability.
Bibtex
@inproceedings{kim2023globally,
title={Globally defined dynamic modelling and geometric tracking controller design for aerial manipulator},
author={Kim, Byeongjun and Lee, Dongjae and Byun, Jeonghyun and Kim, H Jin},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
pages={5386--5392},
year={2023},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *