
Real-time motion planning of a hydraulic excavator using trajectory optimization and model predictive control
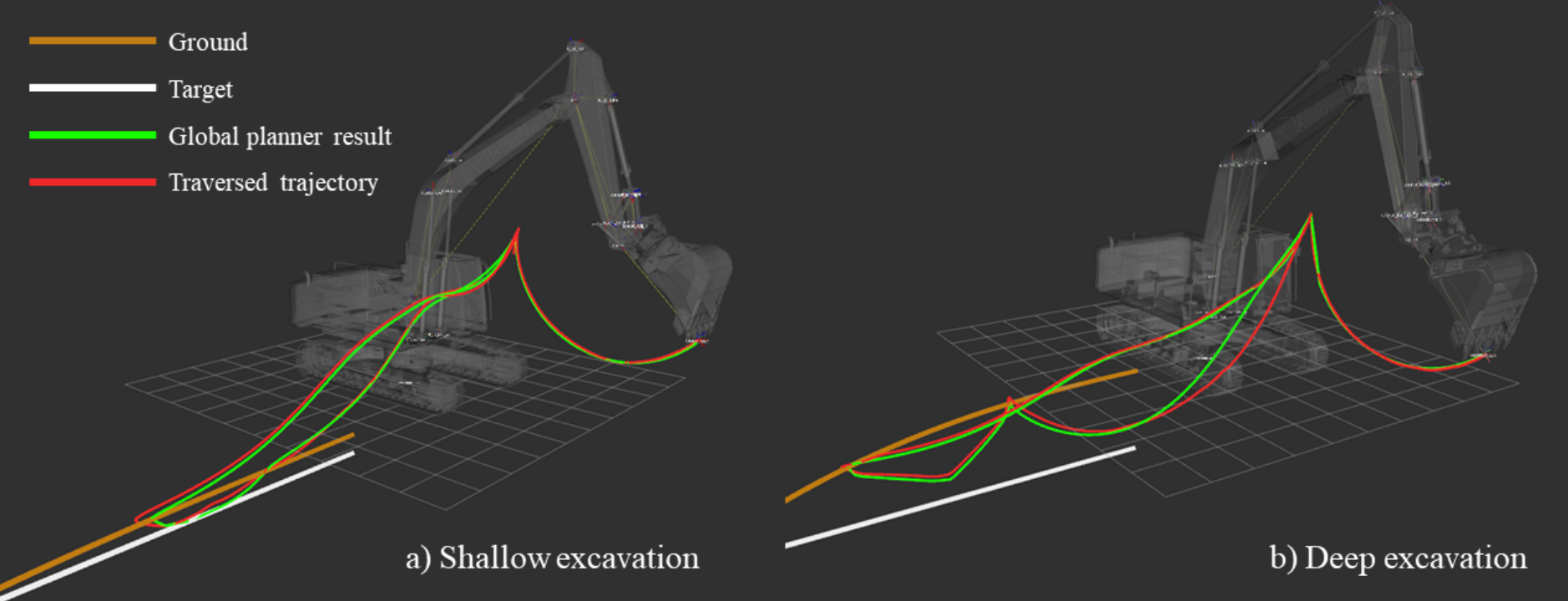
📃 Abstract: Automation of excavation tasks requires real-time trajectory planning satisfying various constraints. To guarantee both constraint feasibility and real-time trajectory re-plannability, we present an integrated framework for real-time optimization-based trajectory planning of a hydraulic excavator. The proposed framework is composed of two main modules: a global planner and a real-time local planner. The global planner computes the entire global trajectory considering excavation volume and energy minimization while the local counterpart tracks the global trajectory in a receding horizon manner, satisfying dynamic feasibility, physical constraints, and disturbance-awareness. We validate the proposed planning algorithm in a simulation environment where two types of operations are conducted in the presence of emulated disturbance from hydraulic friction and soil-bucket interaction: shallow and deep excavation. The optimized global trajectories are obtained in an order of a second, which is tracked by the local planner at faster than 30 Hz. To the best of our knowledge, this work presents the first real-time motion planning framework that satisfies constraints of a hydraulic excavator, such as force/torque, power, cylinder displacement, and flow rate limits.
✊ Motivation: Most existing works on excavator automation optimize the entire trajectory at one offline so that:
❗ The excavator becomes vulnerable to instantaneous disturbance during operation, and
❗ External disturbances to hydraulic excavators such as soilbucket interaction and hydraulic friction are usually intractable and unignorable; accordingly, such unmodelable dynamics could result in sub-optimality and even constraint violation.
💡 Main contributions:
✔️ Integration of global planner and local planner for considering both operational and physical constraints.
✔️ Formulation of the global trajectory optimization problem of the reduced dimension, which permits computation time shorter than a few seconds.
✔️ Real-time constrained trajectory generation considering external disturbance.
Bibtex
@inproceedings{lee2021real,
title={Real-time motion planning of a hydraulic excavator using trajectory optimization and model predictive control},
author={Lee, Dongjae and Jang, Inkyu and Byun, Jeonghyun and Seo, Hoseong and Kim, H Jin},
booktitle={2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={2135--2142},
year={2021},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *