
A hybrid controller enhancing transient performance for an aerial manipulator extracting a wedged object
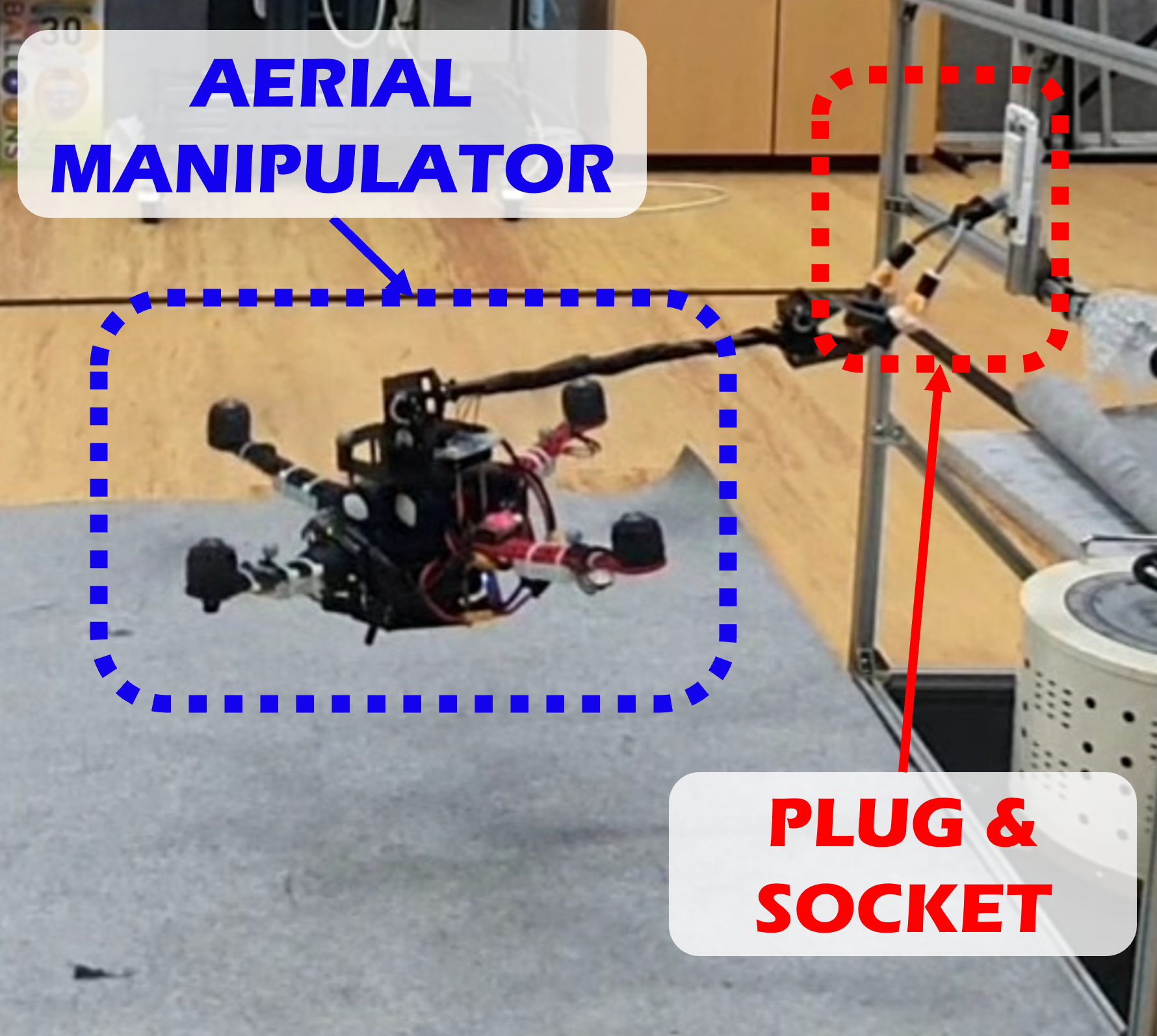
Abstract: Autonomous aerial manipulation requires the capability to handle inevitable dynamic changes during physical interaction. Previously, very few studies have addressed the stability and transient performance of the scenarios involving abrupt changes in dynamics. This paper proposes a hybrid controller enhancing transient performance for an aerial manipulator extracting an object wedged in a static structure. This task incurs a significant jump in the interaction force on the end-effector so that the analysis using the concept of hybrid dynamical systems is required. To demonstrate the dynamic characteristics of the object-extracting aerial manipulator, we derive the dynamic equations for two flight modes, i.e., free-flight and object-extracting, and the rule of state jumps. Also, we design control strategies which enhance the transient performance during flight mode transition. Then, the stability of the proposed control law is proven, and the overshoot reduction after the object extraction is analyzed. To show the improved performance, we conduct plug-pulling experiments with a quadrotor-based aerial manipulator using the proposed controller and two different existing controllers. The comparative results confirm that our controller enables the aerial manipulator to maintain its stability after the flight mode transition and shows the best transient performance in overshoot minimization among three controllers.
Bibtex
@article{byun2023hybrid,
title={A Hybrid Controller Enhancing Transient Performance for an Aerial Manipulator Extracting a Wedged Object},
author={Byun, Jeonghyun and Jang, Inkyu and Lee, Dongjae and Kim, H Jin},
journal={IEEE Transactions on Automation Science and Engineering},
year={2023},
publisher={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *