
Safe receding horizon motion planning with infinitesimal update interval
📃 Abstract: Safety verification in motion planning is known to be computationally burdensome, despite its importance in robotics. In this paper, we investigate the behavior of safe receding horizon motion planners when the update interval becomes infinitesimal. By requiring the trajectory parameters to evolve continuously in time, the trajectory optimization problem is reformulated into a time-derivative form, whose decision variables are their rate of change. This results in a quadratic programming problem which directly provides safe input, and can be regarded as a real-time safety filter. The input expressivity is also enhanced by leveraging the differentiable structure of the parameter space. The proposed safety filter is experimentally validated using a wheeled ground robot in obstacle-cluttered environments. The result shows that the safety filter is capable of generating safe inputs in real-time, while addressing hundreds of constraints simultaneously.
✊ Motivation:
❗ Complex trajectory planning in a receding horizon manner still remains nonlinear and nonconvex in general, making online safety verification computationally burdensome.
❗ Since a failure to find a feasible trajectory within the trajectory update time interval may put the robotic system at a safety risk, blindly choosing a short τplan in the current form is not practicable.
💡 Main contributions:
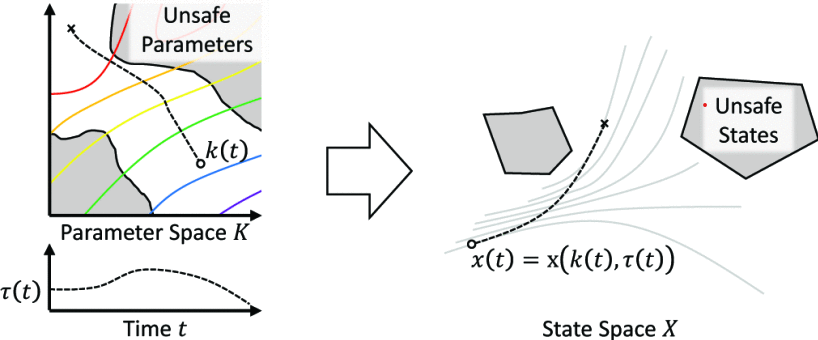
✔️ We examine the asymptotic behavior of safe receding horizon motion planning (RHP) problems when the update interval becomes infinitesimal.
✔️ With some modifications to the optimal RHP problem, infinitesimal update interval yields a safety filter based on quadratic programming (QP).
✔️ The resulting safety filter is safe, recursively feasible, and can be solved in real-time.
✔️ Prevention of excessive oscillations in the desired pose and twist of the aerial manipulator.
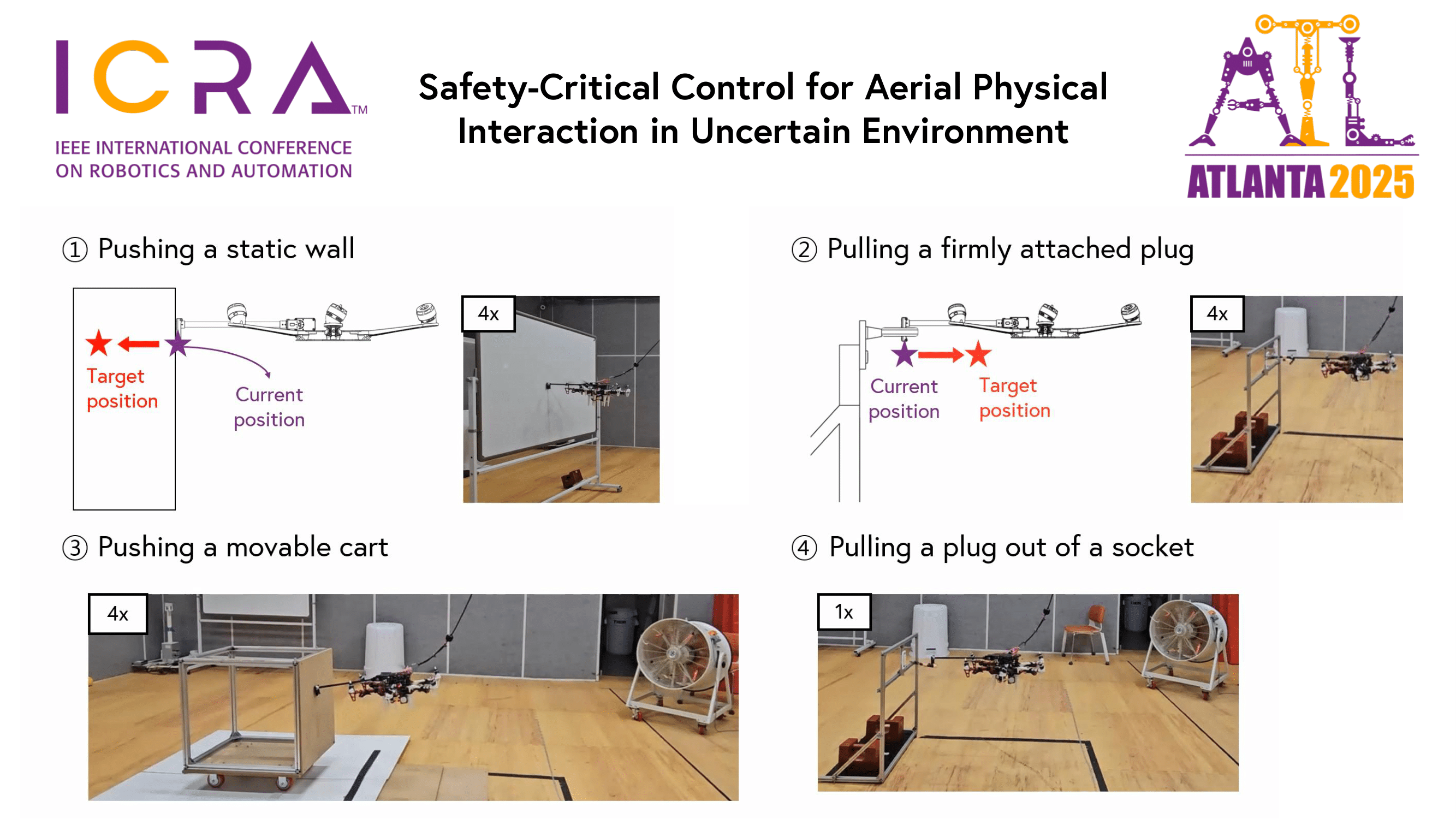
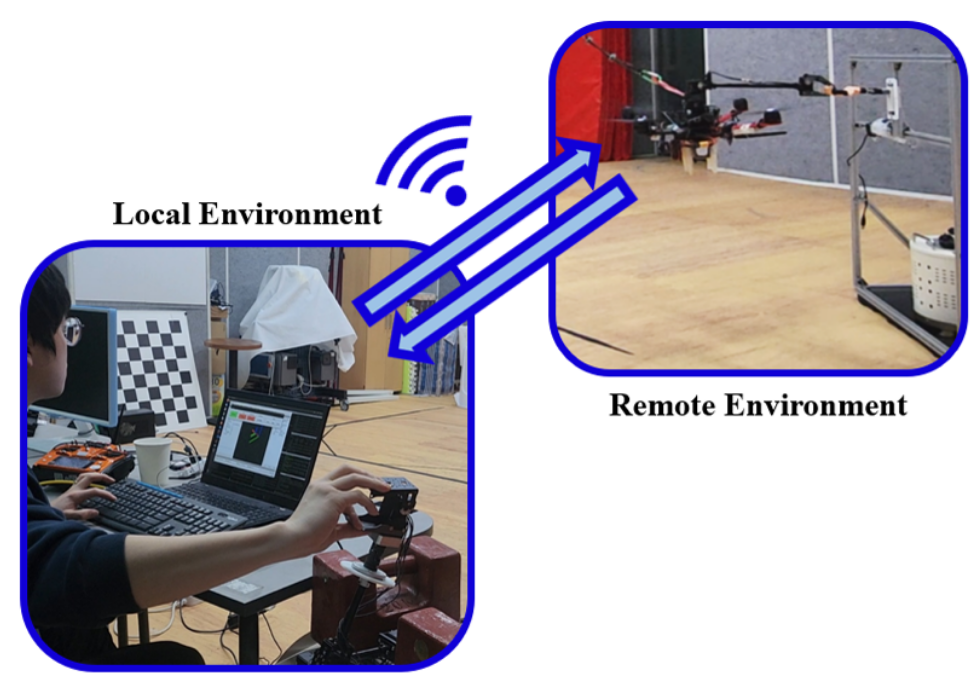
✔️ We demonstrate its performance through real-world experiments.
Bibtex
@inproceedings{jang2024safe,
title={Safe receding horizon motion planning with infinitesimal update interval},
author={Jang, Inkyu and Hwang, Sunwoo and Byun, Jeonghyun and Kim, H Jin},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={14244--14250},
year={2024},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *