
Robust Control of the Aerial Manipulator with a Fixed End-effector Position
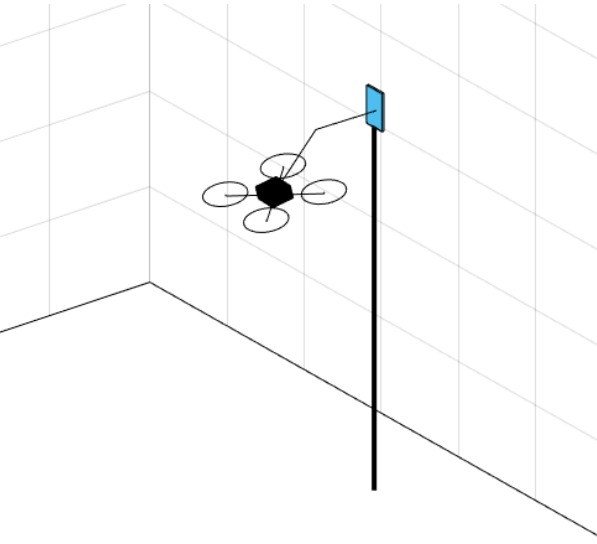
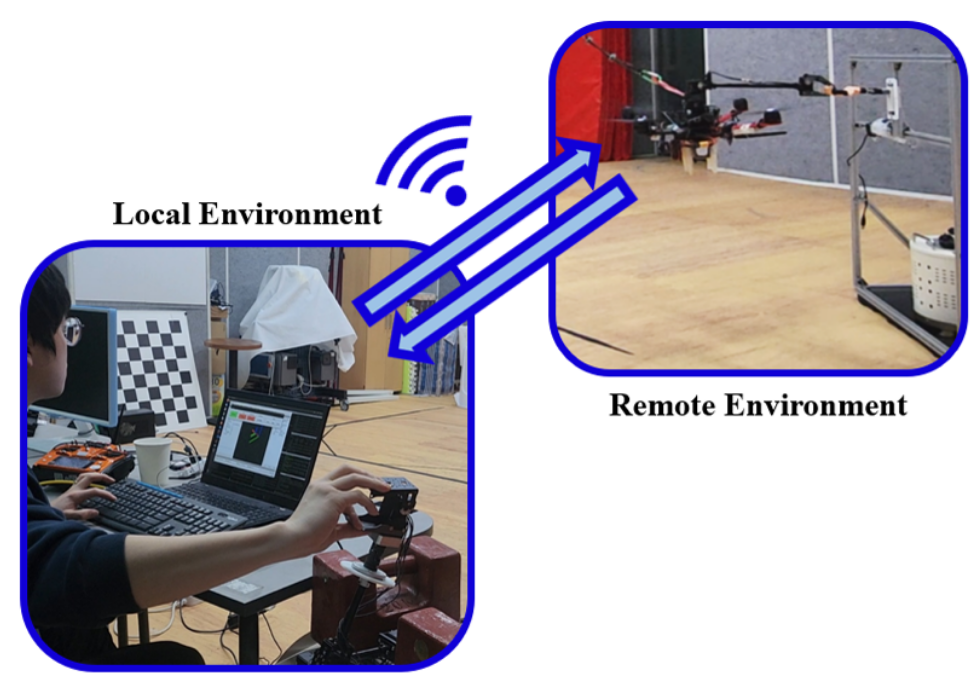
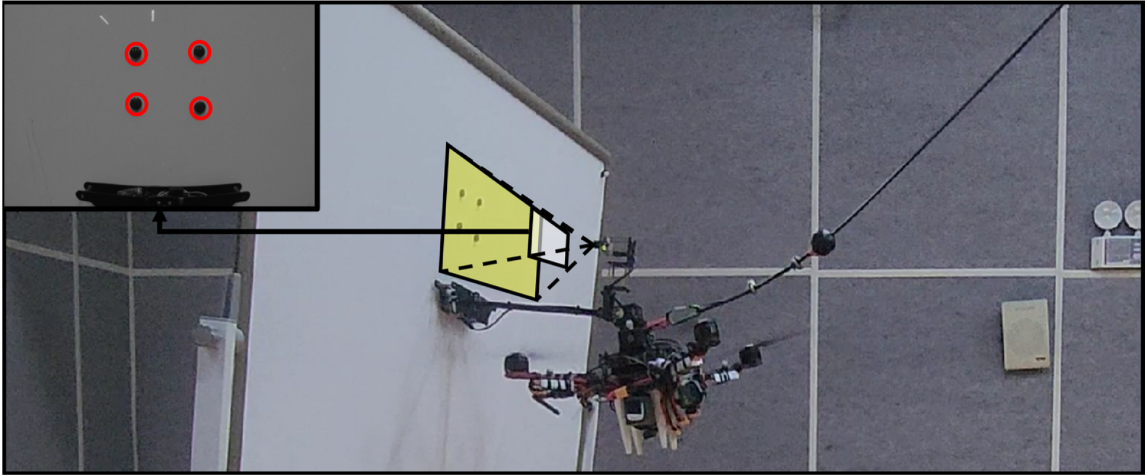
Abstract: The necessity for aerial manipulation while grasping a fixed point is on the rise to broaden the range of tasks that can be performed with flying robots such as plug-pulling or drawer knob grasping. In this paper, a robust controller for the aerial manipulator with a fixed end-effector position is designed, and stability analysis is performed with the proposed control law. Using the constrained Euler-Lagrange equation, a dynamic equation for the aerial manipulator which is freely rotating around the fixed point is derived and a disturbance-observer-based (DOB) control law is constructed. A singular perturbation form of the closed-loop system is derived and utilized to conduct the stability analysis. To verify the proposed controller, a numerical simulation was conducted. The simulation results show that the Euler angles satisfactorily follow their desired trajectory. Accordingly, the proposed controller could be applied to actual experiments for future works.
Oral Presentation Video
Bibtex
@inproceedings{byun2021robust,
title={Robust Control of the Aerial Manipulator with a Fixed End-effector Position},
author={Byun, Jeonghyun and Kim, H Jin},
booktitle={2021 21st International Conference on Control, Automation and Systems (ICCAS)},
pages={424--429},
year={2021},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *