
[ROS] How to subscribe serial messages published from Arduino board as a ROS topic?
Arduino board is a type of MCU (MicroController Unit) which can transmit analog/digital sensor outputs via serial communication.
If a sensor you use does not have its own ROS node or package to communicate via ROS messages, using Arduino board might be a solution. Therefore, there needs a way to convert the Serial messages generated from Arduino board to their corresponding ROS messages.
- Operating System: Ubuntu 18.04, 64 bits
- ROS version: melodic
Procedure
Installing Arduino IDE on Ubuntu
At first, download the appropriate version of .tar.gz file on your desired folder from Arduino IDE (usually on Download folder).
Then, unzip the downloaded .tar.gz file as follows:
tar -xf arduino-1.x.xx-linux64.tar.gz
On the upzipped folder, proceed to install Arduino IDE as follows:
cd arduino-1.x.xx
sudo ./install.sh
sudo chown $USER_NAME arduino
where $USER_NAME represents the name of your computer.
Environment setting
You can install the package which is utilized for converting serial messages generated from Arduino board to ROS message type as follows:
sudo apt-get install ros-indigo-rosserial-arduino
sudo apt-get install ros-indigo-rosserial
where indigo means your ROS version. In my case,
sudo apt-get install ros-melodic-rosserial-arduino
sudo apt-get install ros-melodic-rosserial
Then, download ros_lib library to ubuntu folder as follows:
cd /path/to/arduino/libraries
rm -rf ros_lib
rosrun rosserial_arduino make_libraries.py
Executing some example sketches
With your arduino board connected, open your arduino IDE by typing arduino on your terminal. The following window will be opened:
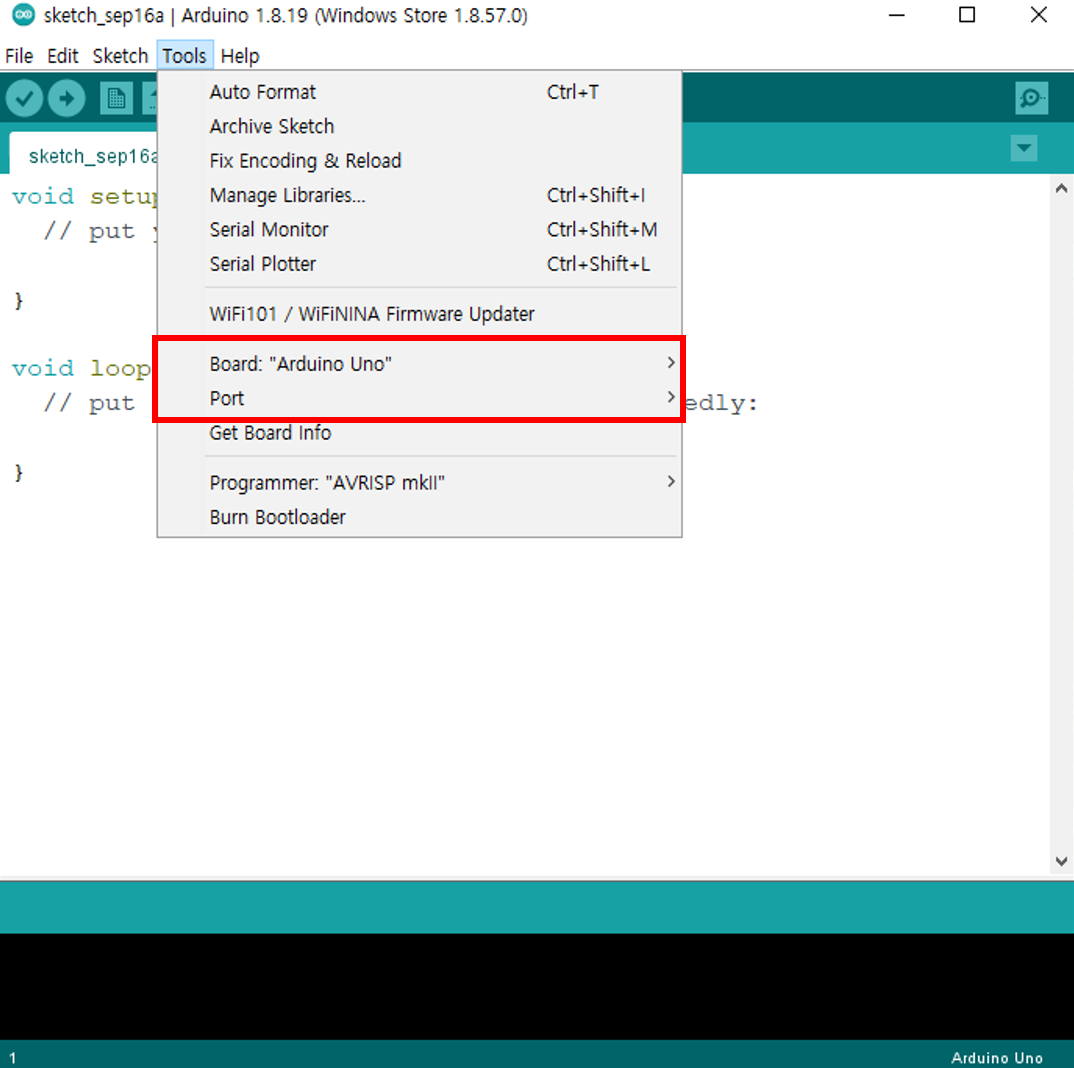
Then, check the settings of “Board” and “Port” in “tools” located at the toolbar.
Let’s assume that you are receiving an analog signal through A0 from a sensor (e.g., voltage sensor) and send it as a ROS topic message std_msgs/UInt16, you first write the following code on the arduino IDE.
#include
#include <std_msgs/UInt16.h>
ros::NodeHandle nh;
int sensorPin = A0;
int sensorValue = 0; // variable to store the value coming from the sensor
std_msgs::UInt16 signal;
ros::Publihser signal_pub("/signal", &signal)
void setup() {
// declare the ledPin as an OUTPUT:
pinMode(ledPin, OUTPUT);
// set baud rate as 57600
Serial.begin(57600)
}
void loop() {
// read the value from the sensor:
sensorValue = analogRead(sensorPin);
// publish the ROS topic
nh.initNode();
signal_pub.data = sensorValue;
nh.advertise(signal_pub);
// stop the program for 10 milliseconds:
delay(10);
}
</code>
</pre>
Click on the "check" symbol to check whether there is a grammar issue or not, then click on "upward" symbol to upload the code to your board.
Then, turn on your at least two terminal windows, then type the following commands:
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0 _baud:=57600
Finally, check whether your topic is published via rostopic pub.
## Reference
https://www.arduino.cc/en/hardware
http://wiki.ros.org/rosserial_arduino/Tutorials/Arduino%20IDE%20Setup
Leave a Comment
Your email address will not be published. Required fields are marked *