
Image-based time-varying contact force control of aerial manipulator using robust impedance filter
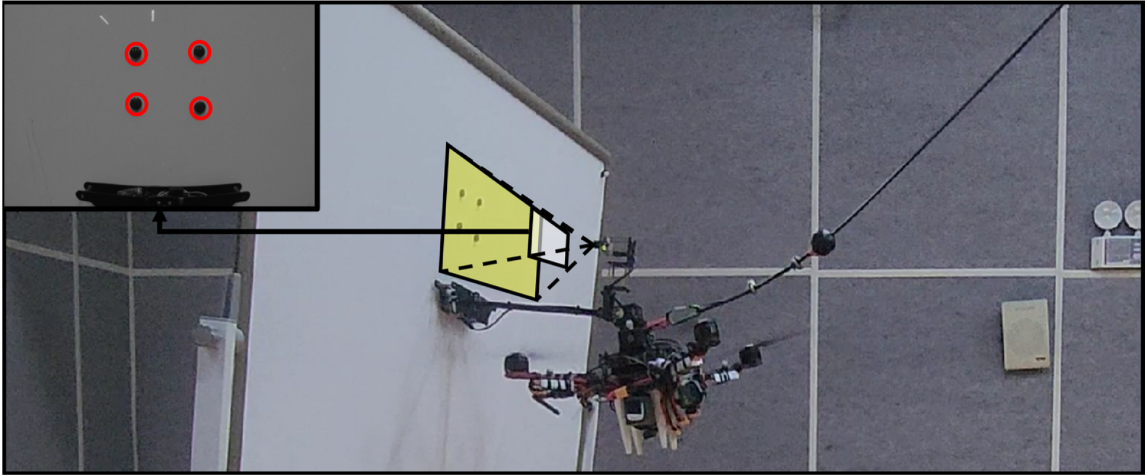
📃 Abstract: The use of aerial manipulators for safe and efficient physical interaction with their surrounding environments has been gaining attention within the aerial robotics research community. In this letter, we present an image-based time-varying force tracking controller for an aerial manipulator conducting forceful interaction with a static surface. To this end, we first extract visual features from the surface using a monocular camera and calculate image feature vectors for the rotational and translational movements of the camera. Then, the RISATE (Robust Integral of SATuration Error)-based impedance filter continuously updates the desired values of the image features based on the previously designated force profile. Our stability analysis verifies that the error between the desired and actual contact force is uniformly ultimately bounded in an arbitrarily small bound with the proposed strategy even with the switching between free-flight and contact modes. Moreover, through time-varying force-tracking experiments with a quadrotor-based aerial manipulator, we validate the reproducibility and improved force-tracking performance of the proposed method.
✊ Motivation:
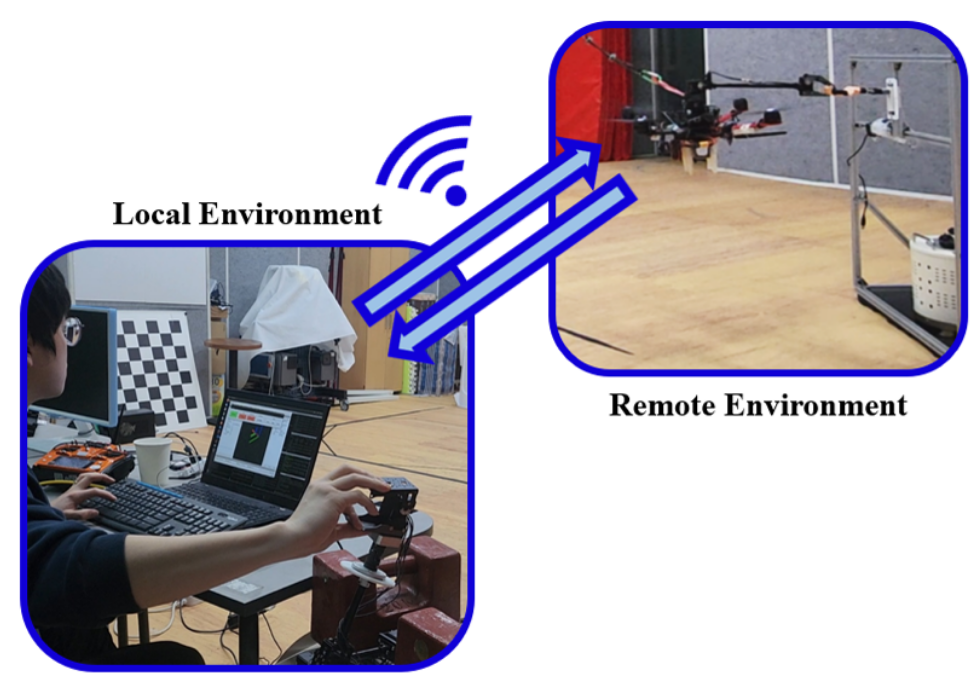
❗ Remote manipulation in hard-to-reach areas such as walls or windows installed on tall structures and high ceilings
❗ Regulation of the contact force exerted on the aerial manipulator’s end-effector
❗ Estimation of the surface pose using onboard sensors due to a lack of prior information on the surface in real applications
💡 Main contributions:
✔️ No need for interaction wrench measurement or estimation
✔️ Precise motion-tracking performance achieved through a DOB-based control structure
✔️ Rigorous guarantee of motor thrust limits acquired by a CBF-based safety filter
✔️ Prevention of excessive oscillations in the desired pose and twist of the aerial manipulator
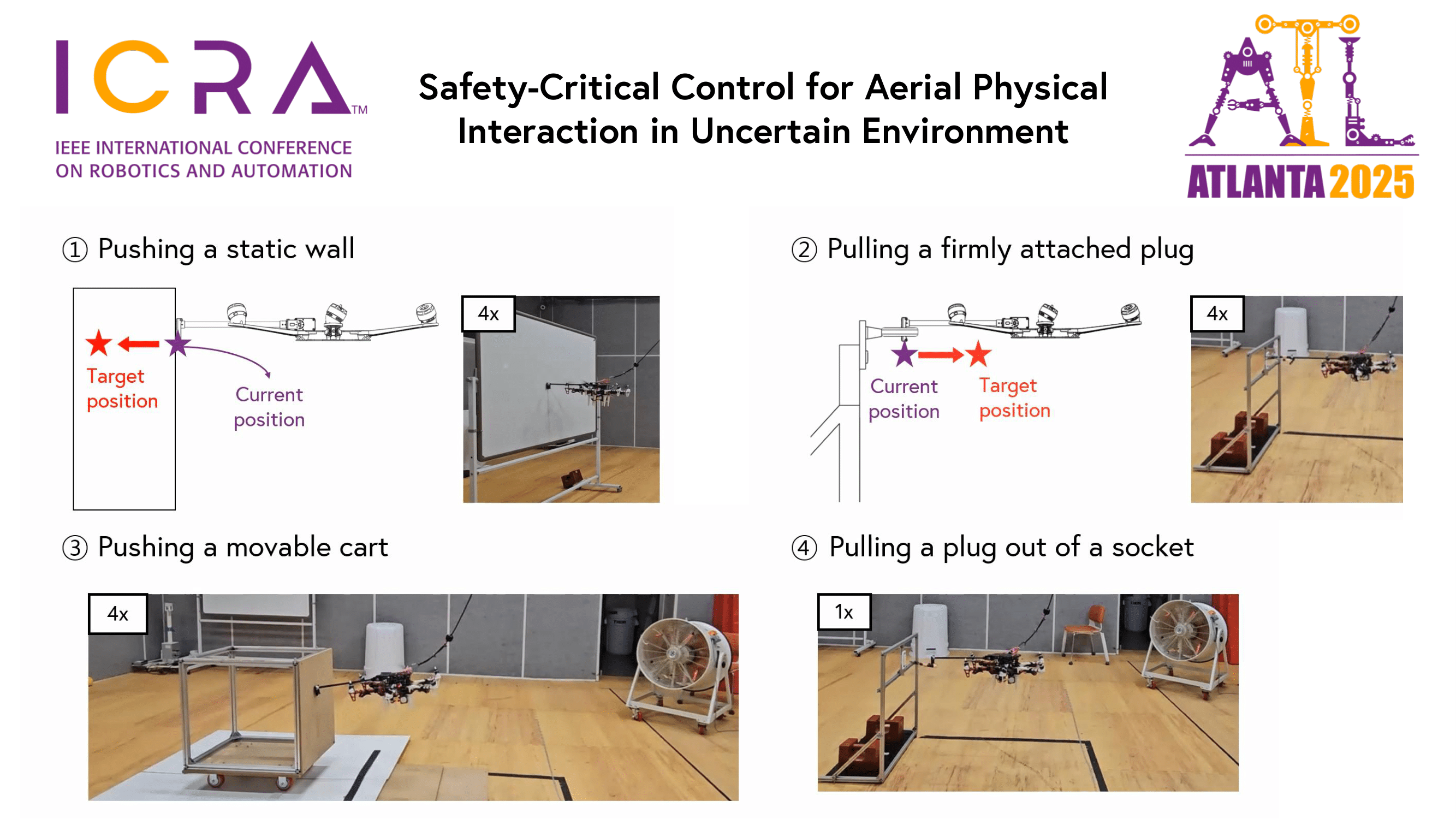
✔️ Real-world validation demonstrated through pushing and pulling experiments with both static and dynamic structures
Bibtex
@article{byun2024image,
title={Image-Based Time-Varying Contact Force Control of Aerial Manipulator using Robust Impedance Filter},
author={Byun, Jeonghyun and Kim, Junha and Eom, Dohyun and Lee, Dongjae and Kim, Changhyeon and Kim, H Jin},
journal={IEEE Robotics and Automation Letters},
year={2024},
publisher={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *