
Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller
👥 Authors: Dongjae Lee, Sunwoo Hwang, Jeonghyun Byun, Seung Jae Lee and H. Jin Kim
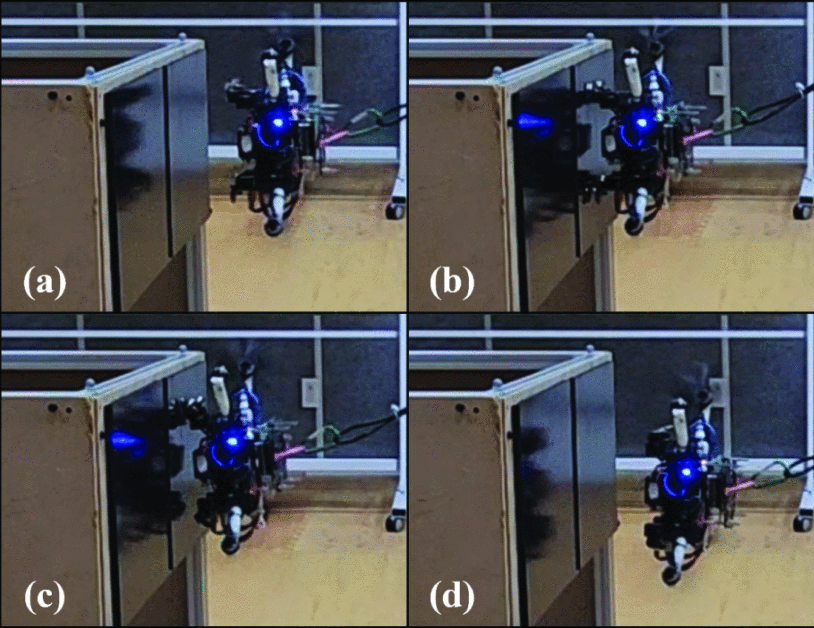
📃 Abstract: Aerial unperching of multirotors has received little attention as opposed to perching that has been investigated to elongate operation time. This study presents a new aerial robot capable of both perching and unperching autonomously on/from a ferromagnetic surface during flight, and a switching controller to avoid rotor saturation and mitigate overshoot during transition between free-flight and perching. To enable stable perching and unperching maneuvers on/from a vertical surface, a lightweight (~ 1 kg), fully actuated tiltrotor that can hover at 90 [deg] pitch angle is first developed. We design a perching/unperching module composed of a single servomotor and a magnet, which is then mounted on the tiltrotor. A switching controller including exclusive control modes for transitions between free-flight and perching is proposed. Lastly, we propose a simple yet effective strategy to ensure robust perching in the presence of measurement and control errors and avoid collisions with the perching site immediately after unperching. We validate the proposed framework in experiments where the tiltrotor successfully performs perching and unperching on/from a vertical surface during flight. We further show effectiveness of the proposed transition mode in the switching controller by ablation studies where large overshoot and even collision with a perching site occur. To the best of the authors’ knowledge, this work presents the first autonomous aerial unperching framework using a fully actuated tiltrotor.
✊ Motivation:
❗ Autonomous percing AND unperching capabilities can save both the energy and need for human intervention.
💡 Main contributions:
✔️ Omnidirectional tilrotor with unperching mechanism to perform both perching and unperching on a vertical ferromagnetic wall
✔️ Switching controller and motion strategy to avoid rotor saturation during perching and overshoot during unperching
✔️ Experimental validation of aerial perching and unperching on/from a vertical surface
Bibtex
@inproceedings{lee2024autonomous,
title={Autonomous aerial perching and unperching using omnidirectional tiltrotor and switching controller},
author={Lee, Dongjae and Hwang, Sunwoo and Byun, Jeonghyun and Lee, Seung Jae and Kim, H Jin},
booktitle={2024 IEEE International Conference on Robotics and Automation (ICRA)},
pages={1590--1596},
year={2024},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *