
Stability and robustness analysis of plug-pulling using an aerial manipulator
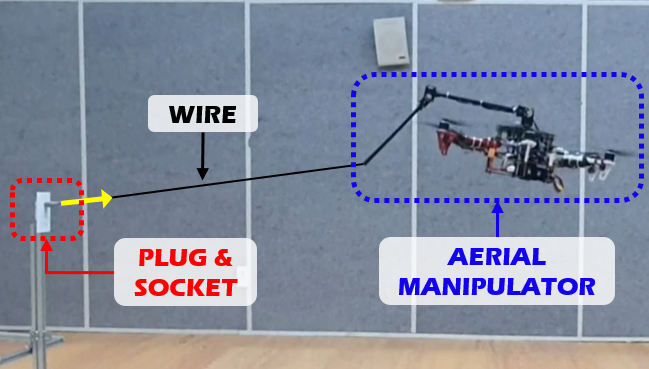
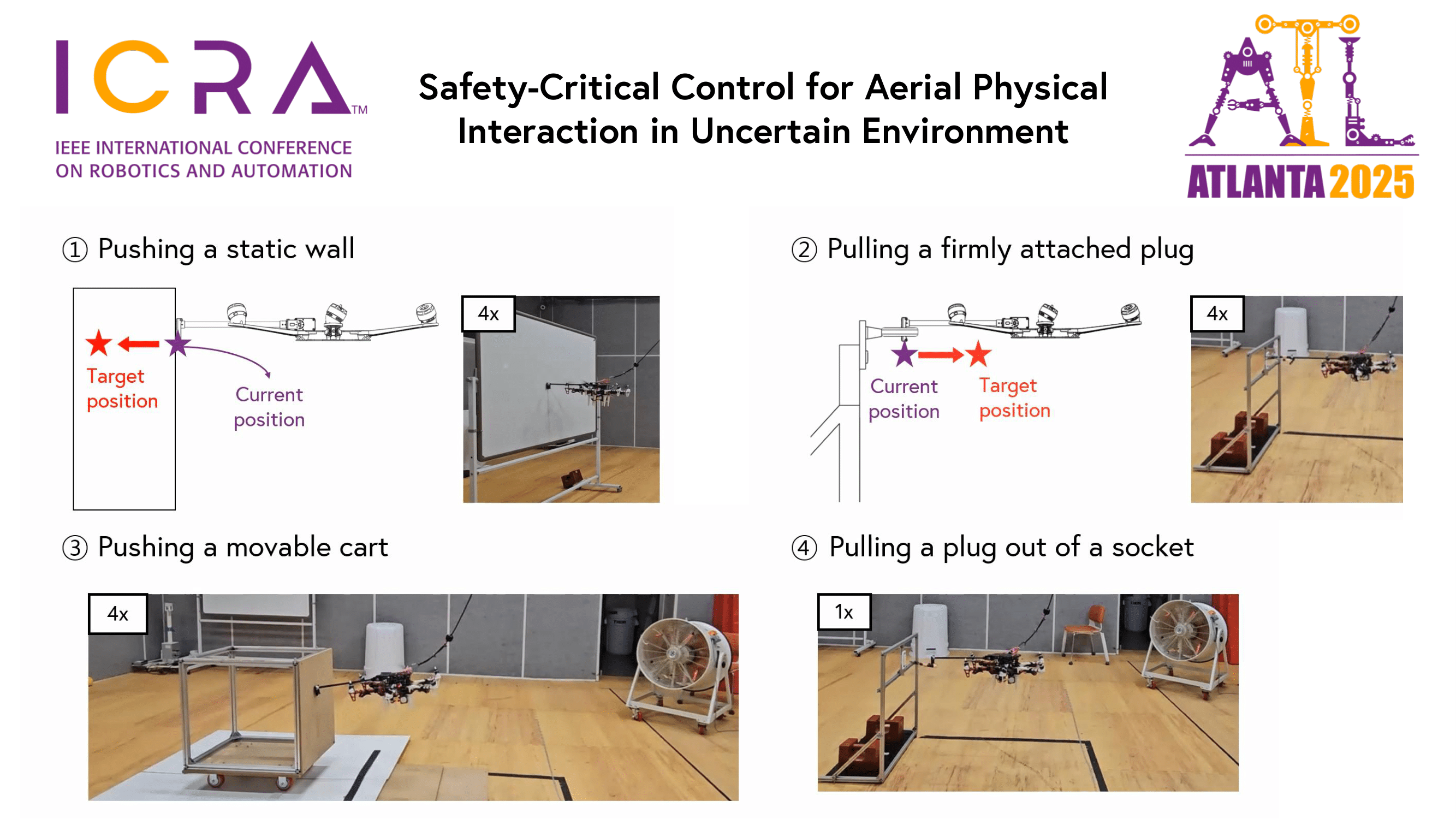
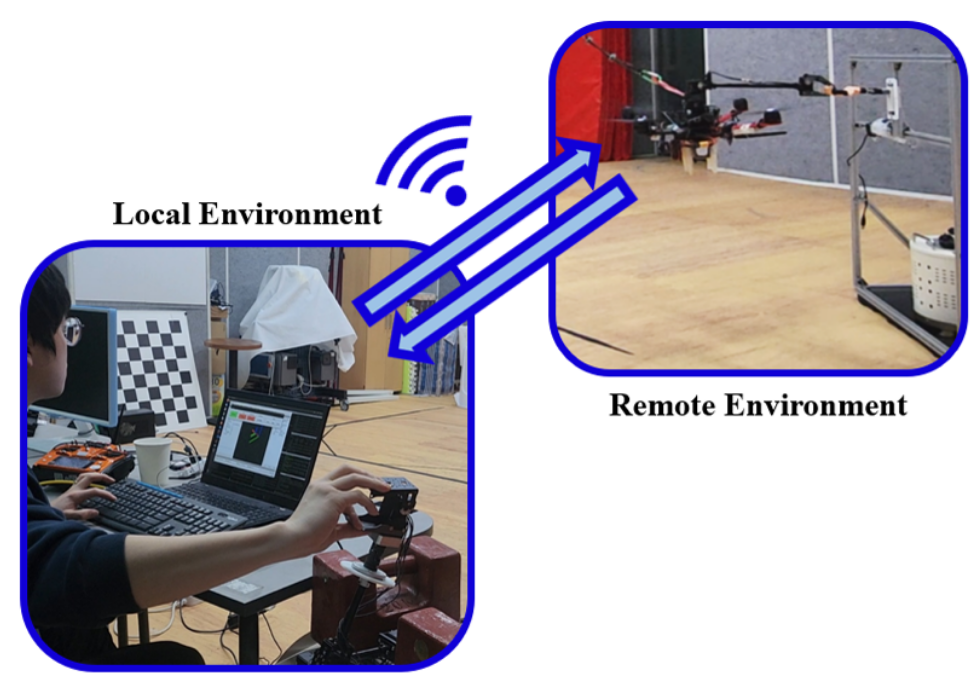
📃 Abstract: In this paper, an autonomous aerial manipulation task of pulling a plug out of an electric socket is conducted, where maintaining the stability and robustness is challenging due to sudden disappearance of a large interaction force. The abrupt change in the dynamical model before and after the separation of the plug can cause destabilization or mission failure. To accomplish aerial plug-pulling, we employ the concept of hybrid automata to divide the task into three operative modes, i.e, wire-pulling, stabilizing, and free-flight. Also, a strategy for trajectory generation and a design of disturbance-observer-based controllers for each operative mode are presented. Furthermore, the theory of hybrid automata is used to prove the stability and robustness during the mode transition. We validate the proposed trajectory generation and control method by an actual wire-pulling experiment with a multirotor-based aerial manipulator.
✊ Motivation:
❗ Remote manipulation in hard-to-reach areas such as walls or windows installed on tall structures and high ceilings
❗ Regulation of the contact force exerted on the aerial manipulator’s end-effector
❗ Estimation of the surface pose using onboard sensors due to a lack of prior information on the surface in real applications
💡 Main contributions:
✔️ First attempt to conduct a plug-pulling task using an aerial manipulator, which involves a significant mode change.
✔️ Propose a trajectory generation strategy and DOB control structure for each operative mode.
✔️ Present a thorough analysis on the stability and robustness of the aerial manipulator using the hybrid automata theory.
Bibtex
@inproceedings{byun2021stability,
title={Stability and Robustness Analysis of Plug-Pulling using an Aerial Manipulator},
author={Byun, Jeonghyun and Lee, Dongjae and Seo, Hoseong and Jang, Inkyu and Choi, Jeongjun and Kim, H Jin},
booktitle={2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages={4199--4206},
year={2021},
organization={IEEE}
}
Leave a Comment
Your email address will not be published. Required fields are marked *