
Safety-critical control for aerial physical interaction in uncertain environment
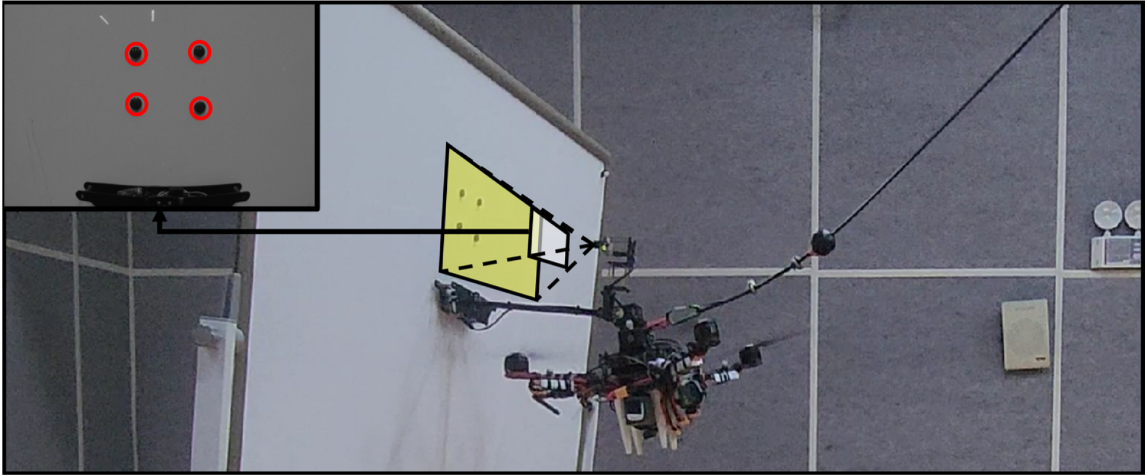
📃 Abstract: Aerial manipulation for safe physical interaction with their environments is gaining significant momentum in robotics research. In this paper, we present a disturbance-observer-based safety-critical control for a fully actuated aerial manipulator interacting with both static and dynamic structures. Our approach centers on a safety filter that dynamically adjusts the desired trajectory of the vehicle’s pose, accounting for the aerial manipulator’s dynamics, the disturbance observer’s structure, and motor thrust limits. We provide rigorous proof that the proposed safety filter ensures the forward invariance of the safety set—representing motor thrust limits—even in the presence of disturbance estimation errors. To demonstrate the superiority of our method over existing control strategies for aerial physical interaction, we perform comparative experiments involving complex tasks, such as pushing against a static structure and pulling a plug firmly attached to an electric socket. Furthermore, to highlight its repeatability in scenarios with sudden dynamic changes, we perform repeated tests of pushing a movable cart and extracting a plug from a socket. These experiments confirm that our method not only outperforms existing methods but also excels in handling tasks with rapid dynamic variations.
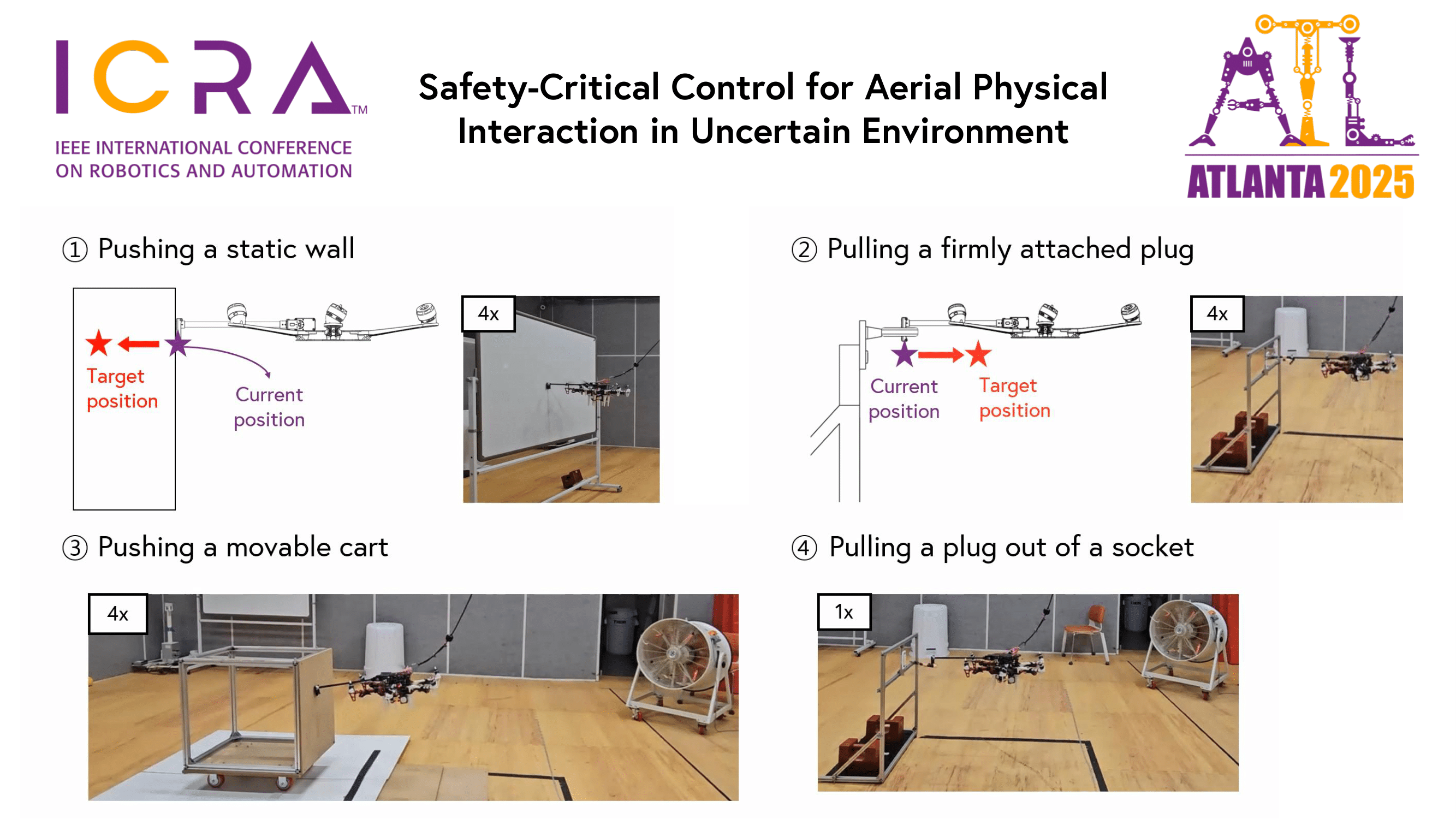
✊ Motivation: Consideration on two important factors of the APhI (Aerial Physical Interaction) shown below:
❗ External disturbances generated by the physical interaction
❗ Vehicle’s actuation limit such as motor thrust limit
💡 Main contributions:
✔️ No need for interaction wrench measurement or estimation
✔️ Precise motion-tracking performance achieved through a DOB-based control structure
✔️ Rigorous guarantee of motor thrust limits acquired by a CBF-based safety filter
✔️ Prevention of excessive oscillations in the desired pose and twist of the aerial manipulator
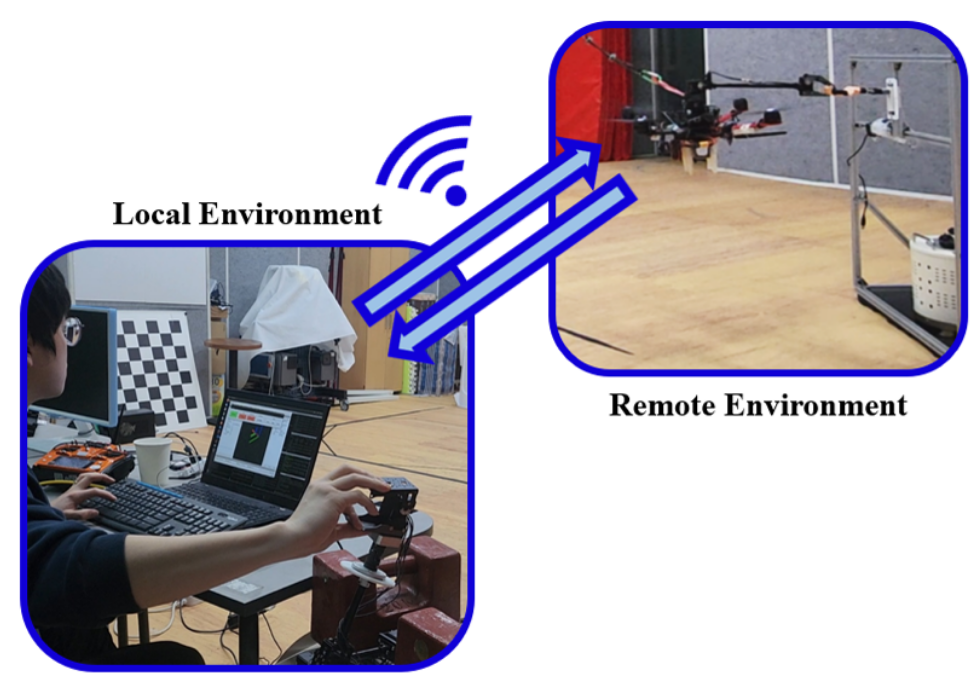
✔️ Real-world validation demonstrated through pushing and pulling experiments with both static and dynamic structures
Bibtex
@INPROCEEDINGS{byun2025safety,
author={Byun, Jeonghyun and Kim, Yeonjun, Lee, Dongjae and Kim, H. Jin},
booktitle={2025 International Conference on Robotics and Automation (ICRA)},
title={Safety-critical control for aerial physical interaction in uncertain environment},
year={2025},
volume={},
number={},
pages={7526--7532},
keywords={},
doi={}}
Leave a Comment
Your email address will not be published. Required fields are marked *